
-

Werksta Norge AS:
Regionleder
-

Nellemann Machinery AS:
Verksmester/Driftssjef
-

Møller Bil Åsane:
Salgssjef
-

Motor Forum Oslo:
Bilmekaniker
-

RSA Bil Kristiansand:
Bilmekaniker/tekniker - RSA BIL Kristiansand
-

RSA BIL Oslo:
Produksjonsleder - RSA BIL Oslo
-

Bilia Norge AS:
Business Controller, Region JLR & Outlet
-

DNB Finans AS:
Key Account Manager – Nordland, Troms og Finnmark
-

RSA Bil Kristiansand:
Bilselger - RSA BIL Kristiansand
-

RSA Bil Arendal:
Bilmekaniker/tekniker - RSA BIL Arendal
-

Team Verksted AS:
Varebil og lastebil mekaniker
-

Team Verksted AS:
Lakkerer Trondheim
-

Bertel O. Steen Lastebil og Buss AS:
Mekaniker
-

Hagen Bil AS:
Delemedarbeider
-

BEMA AS:
Ordre og kundeservicemedarbeider / lagermedarbeider
-

Møller Bil Skadesenter Alnabru:
Bilmekaniker/PPK-kontrollør
-

Motorpool Handel AS:
Regnskaps- og økonomimedarbeider
-

Toyota Haugesund AS:
Ettermarkedsleder
-

BMW Group Norge:
BMW Technical Support Expert
-

Bil & Motorservice AS:
Bil- og tungbilmekaniker med mulighet for medeierskap!
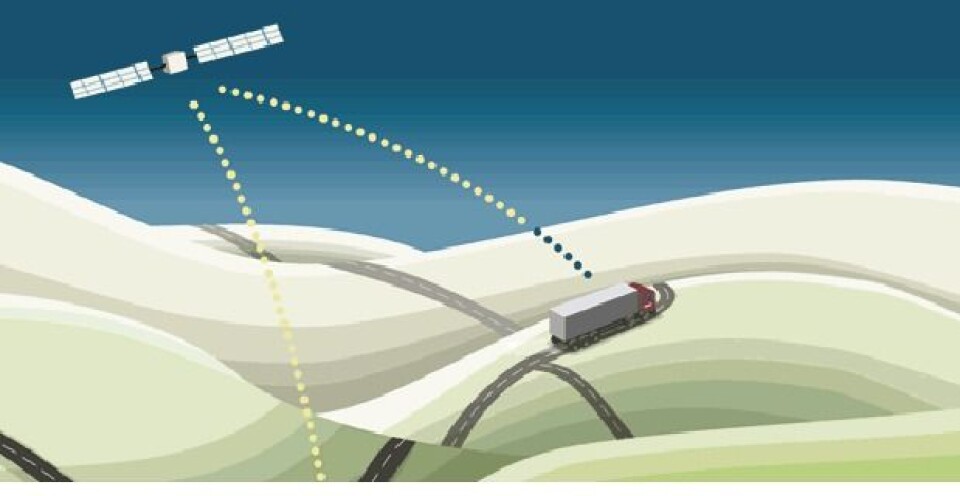
GPS-styrt cruisecontroll ser bakkene
I Scanias nyeste cruisekontroll integreres GPS og kartverk med stigningsgrad på veiene.

-

Werksta Norge AS:
Regionleder
-

Nellemann Machinery AS:
Verksmester/Driftssjef
-

Møller Bil Åsane:
Salgssjef
-

Motor Forum Oslo:
Bilmekaniker
-

RSA Bil Kristiansand:
Bilmekaniker/tekniker - RSA BIL Kristiansand
-

RSA BIL Oslo:
Produksjonsleder - RSA BIL Oslo
-

Bilia Norge AS:
Business Controller, Region JLR & Outlet
-

DNB Finans AS:
Key Account Manager – Nordland, Troms og Finnmark
-

RSA Bil Kristiansand:
Bilselger - RSA BIL Kristiansand
-

RSA Bil Arendal:
Bilmekaniker/tekniker - RSA BIL Arendal
-

Team Verksted AS:
Varebil og lastebil mekaniker
-

Team Verksted AS:
Lakkerer Trondheim
-

Bertel O. Steen Lastebil og Buss AS:
Mekaniker
-

Hagen Bil AS:
Delemedarbeider
-

BEMA AS:
Ordre og kundeservicemedarbeider / lagermedarbeider
-

Møller Bil Skadesenter Alnabru:
Bilmekaniker/PPK-kontrollør
-

Motorpool Handel AS:
Regnskaps- og økonomimedarbeider
-

Toyota Haugesund AS:
Ettermarkedsleder
-

BMW Group Norge:
BMW Technical Support Expert
-

Bil & Motorservice AS:
Bil- og tungbilmekaniker med mulighet for medeierskap!
Cruisekontroll er et kjært verktøy for enhver langtransportsjåfør.
Men desto mer kupert terrenget er, desto mindre glede har man av cruisen - spesielt hvis fokus også er å minimalisere drivstofforbruket.
De fleste har vel derfor lenge ventet på en mer intelligent cruiscontrol.
Det man trenger er en forutseende funksjon som også skjønner hvordan en lastebil må fartsstyres før inngang og utgang av bakker - enten de går opp eller ned.
Kunne man bare koblet GPSen og kartverket og cruisecontrollen sammen, har vel mange tenkt. Og nå er Scania etter eget sigende først på markedet med slik teknologi i sin Active Prediction cruisecontroll.
Og dette kan lønne seg! Foreløpig maks besparelse sier Scania er tre prosent kontra en vanlig cruiskontroll, og da i en kupert rute hvor veien aldri er helt flat (hørte vi Norge?). De største besparelsene oppnås ved å justere ned hastigheten før en nedoverbakke.
Tidstapet over en full dag med kjøring er knapt noen minutter. For en transportør kan tre prosent utgjøre nærmere 1,700 liter drivstoff i året (en 40-tonns kombinasjon som kjører 180,000 kilometer i året).
De som vil oppnå størst gevinst er sannsynligvis mindre erfarne sjåfører - og som samtidig vil ha fordelen av å samtidig lære mest mulig økonomisk kjørestil i prosessen.
Erfarne sjåfører som er godt kjent med ruta de kjører vil oppnå mindre, men på ukjente ruter, i mørket og under krevende værforhold er det sannsynlig at Active Prediction vil hjelpe også dem å spare drivstoff, mener Scania.
Systemet fungerer kun fra hastighet over 60 km/t, og på veier det faktisk er tilstrekkelig kartdata på. Foreløpig er det antydet 95 prosent av hovedveien i Norge. Ved lavere hastigheter enn 60 km/t - eller hvor det ikke finnes kartdata - har kjøretøyet den vanlige cruise control funksjonen.
Se video her - og mer forklaring under videoen.
Kartdataene er lagret i Scania Communicator, kjøretøygrensesnittet som konstant samler og overfører sjåfør- og kjøretøydata, så vel som posisjonerer til Scania Fleet Management-portalen.
Active Prediction-systemet leser og analyserer veidata for opptil tre kilometer i forveien ved vanlig marsjfart på landevei. Det ser etter to grunnleggende situasjoner
· Neste stigning: Hvor skal farten økes, og med hvor mye for å starte klatringen med maksimalt dreiemoment tilgjengelig fra motoren
· Neste nedstigning: Hvor skal farten senkes, og med hvor mye
Hastighetsvinduet varierer med den definerte marsjfarten og er +4 % og -8 %. Hastighetsvinduet basert på disse prosentene er konstant, og kan ikke justeres av sjåføren. For å regulere hastigheten vurderer systemet konstant en rekke kjøretøy- og topografirelaterte faktorer:
· Vekten på kjøretøykombinasjonen
· Marsjfart og makshastighet i nedoverbakke definert av sjåføren
· Spesifikasjonene og ytelsene til lastebilen, f.eks motoreffekt, valg av girkasse og utveksling
· Avstand til neste stigning eller nedstigning
· Hvor bratt neste stigning eller nedstigning er
· Påvirkning av påfølgende hendelser langs ruten
· Active Prediction-funksjonen er integrert med adaptive cruise control-systemet, og opprettholder riktig distanse til kjøretøyet foran
Potensiell drivstoffbesparelse
Scanias egne tester har vist at Active Prediction kan gi betydelig besparelse. Her er noen eksempler de oppgir fra tyske magasiners faste testruter:
A. Fire prosent besparelse på delen av testruten til de tyske magasinene, Trucker og Verkehrs-Rundschau, som går på motorvei. Gjelder et vogntog med totalvekt på 40 tonn sammenlignet med vanlig cruise control. Motorveien i dette området er mer eller mindre konstant bølget, med rikelige muligheter til å dra nytte av Active Prediction-systemet.
B. Langs A1 i Syd-Tyskland, på ruten for 1000-Punkte Testen (1000-poengstesten), med sine lange, krevende bakker og mye variert terreng, var besparelsen 1,5% for vogntog med totalvekt på 40 tonn. Under slike forhold er effekten av å øke farten før en klatring relativt liten. På nedstigninger kommer kjøretøyet fort opp i den definerte makshastigheten i nedoverbakke, og bruker derfor retarderen for å kontrollere farten videre under nedstigningen. Denne testruten brukes av de tyske magasinene Lastauto Omnibus og Fernfahrer, samt magasinpartnere fra andre land.
C. På motorveien sørover fra Scania i Södertälje til Jönköping i Syd-Sverige, og tilbake, ble effekten med forskjellig totalvekt vurdert. Ruten gir inntrykk av å være flat, men er egentlig temmelig kupert. Drivstoffbesparelsen med et vogntog på 40 tonn ble 2,6%, med et tidstap over hele ruten på under 2 minutter.
| 20 tonn | 30 tonn | 40 tonn | 50 tonn | 60 tonn | |
| Drivstoffbesparelse | 0.7% | 1.7% | 2.6% | 3.4% | 3.8% |
| Tidstap i løpet av | Under 1 minutt | Under 2 minutter | Under 2 minutter | Under 2 minutter | Under 2 minutter |
Ved høyere totalvekt vil systemet øke hastigheten oftere før klatringer. Det vil også senke farten oftere før en nedstigning ettersom kjøretøyet vil akselerere raskere på vei ned bakken. Kjøretøyet vil også nå den definerte makshastigheten i nedoverbakke raskere, om bakken er bratt nok.
Ved lavere totalvekt er potensialet for drivstoffbesparelse mindre, ettersom hastighetsjusteringer er mindre effektive med lavere potensiell kraft til rådighet.


























